
VOL DE JOUR & VOL DE NUIT
VOL ASSISTE & VOL AUTONOME
HYDROGENE & ELECTRIQUE



SORA DRONES
Le métier de SAPHIR GROUP AERO département SORA DRONES est d’actualiser – de mettre à niveau sécurité (UpGrade), de modifier votre drone (aéronef sans équipage à bord) pour qu’il soit conforme aux exigences techniques, aux normes opérationnelles de sécurité pour voler dans l’espace aérien européen de jour et de nuit. Le niveau d’exigence nécessaire prend pour référence la méthode SORA (Specific Operations Risk Assessment) de l’autorité JARUS (Joint Authorities for Rulemaking on Unmanned Systems) dont 63 pays sont membres comme EASA et EUROCONTROL.
Le respect des exigences permet à l’EASA (European Union Aviation Safety Agency) d’effectuer une expertise et de délivrer :
– Des certificats pour des équipages de conduite lors d’opérations dans différents scénarios de vol.
– Des certificats de navigabilité pour aéronefs en cas de présence d’un système de détection, d’évitement de tiers, d’un système de commandement et de contrôle de la sécurité avec maîtrise des risques, avec un concept, une architecture et des procédés pouvant justifier une atténuation des risques lors des opérations, missions.
La DGAC permet ensuite de valider une autorisation de vol pour l’exploitation en fonction du scénario en France.
MISE A NIVEAU ou MODIFICATION :
Le métier de SAPHIR-GROUP AERO consiste à intervenir dans deux prestations distinctes pour des drones civils :
1-Mise à niveau d’un aéronef, d’un drone existant : (sans nouvelle certification)
Cette opération consiste à ajouter des fonctions complémentaires et indépendantes sans affecter les critères de performance, de sécurité présents dans le dossier technique d’origine de l’aéronef sans équipage à bord. Dans ce cas, il y a donc aucune modification de l’attestation de conception du constructeur, attestation de type à prévoir.
2-Modification d’un aéronef, d’un drone existant :
Les modifications imposent une modification technique de l’aéronef ainsi qu’une nouvelle révision de l’attestation de conception par un organisme certificateur tiers. Il est nécessaire de déterminer le niveau de sécurité et de justifier les fonctions d’atténuations des risques à partir de la rédaction d’un dossier SORA conforme à l’organisation JARUS. Elles concernent :
– Modification des scénarios de vol autorisés.
– Modification de la masse maximale.
– Modification du contrôleur et du pilote automatique par rapport à la logique de fonctionnement des dispositifs de sécurité.
– Modification de la station SOL et des logiciels installés.
– Modification du dispositif de limitation d’énergie d’impact.
DEUX SECTEURS D’ACTIVITE
SECTEUR CIVIL
Vous dépendez de la réglementation DGAC jusqu’au 1/01/2024. Vous pouvez choisir entre le 1/01/2024 et le 1/01/2026 pour l’exploitation d’un scénario national ou européen. Après le 1/01/2026 tous les scénarios seront sous la réglementation européenne et plus particulièrement sous la direction de l’EASA.
SAPHIR GROUP AERO intervient dans la mise à niveau, la modification des parties SOL, AIR, AERONEF. Les aéronefs sont dans trois types de scénario :
-Les scénarios standards en catégorie OUVERTE et SPECIFIQUE.
-Les scénarios spécifiques hors champ d’application standard.
-Les scénarios en catégorie CERTIFIEE.
SECTEUR ETAT
Votre aéronef est civil et vous l’utilisez pour le compte de l’état. Vous n’entrez pas dans le champ de la réglementation européenne mais dans le champ d’application du Code des transports.
Référence : Article L600-1 Code des transports. Les exploitants appliquent les exigences de l’arrêté SCENARIO (arrêté du 3 décembre 2020 pour les scénarios exclus du champ d’application UE 2018/1139). Si l’aéronef n’évolue pas en circulation aérienne militaire (CAM) alors les exploitants appliquent les dispositions de l’arrêté ESPACE.
SAPHIR GROUP AERO intervient pour une mise. à niveau de l’aéronef sans équipage à bord ou dans une modification.


EXIGENCES pour DRONES CIVILS
DGAC – EASA – JARUS
SAPHIR-GROUP AERO vous propose de découvrir les détails des exigences de la réglementation DGAC – EASA – JARUS en référence aux règlements d’exécution :
-UE 2019/945 du 12 mars 219 (application 1 janvier 2019) concernant la partie système du drone
-UE 2019/947 du 24 mai 2019 ( application 31 décembre 2020) concernant les règles et procédure pour l’exploitation des drones.
En fonction de vos objectifs, de vos missions, vous pourrez choisir :
-Le scénario de vol avec une vue directe de l’aéronef (VLOS) ou hors vue de l’aéronef (BVLOS) .
– La classe de drone en fonction de 3 catégories : Ouverte, spécifique, certifiée.
– Le type de statut d’opérateur, d’exploitant le plus adapté.
REGLEMENTATIONS DRONES D’ETAT
( aéronefs sans équipage à bord )
Utilisation de l’espace aérien pour des activités sous le contrôle et la responsabilité de l’Etat en référence à :
-Arrêté du 3 décembre 2020 relatif à l’utilisation de l’espace aérien par les aéronefs sans équipage à bord
ELI : https://www.legifrance.gouv.fr/eli/arrete/2020/12/3/TREA2017575A/jo/texte
JORF n°0298 du 10 décembre 2020
Texte n° 4
Les conditions applicables aux missions d’aéronefs civils sans équipage à bord exclues du champ d’application du règlement (UE) 2018/1139* imposent l’exécution du règlement d’exécution (UE) 2019/947, de l’article 3 du règlement délégué (UE) 2019/945 en relation avec la définition des scénarios standard nationaux.
*: Voir modification sur l’Ordonnance No 2022-456 du 30 mars 2022 relative à la création d’un régime de déclaration dans le domaine de la sécurité aérienne et à l’adaptation du droit national à l’entrée en vigueur du règlement (UE) 2018/1139 du 4 juillet 2018. ….« L’exercice de l’activité de transport aérien public par les organismes et les personnes non soumis au règlement (UE) 2018/1139 du Parlement européen et du Conseil du 4 juillet 2018 mentionné ci-dessus et aux règlements pris pour son application est subordonné à la délivrance d’un certificat de transporteur aérien par l’autorité administrative. Par dérogation, un décret en Conseil d’Etat définit, au regard de conditions relatives à la catégorie des aéronefs, à leur capacité d’emport ou à la nature des services aériens, les organismes et les personnes non soumis au règlement (UE) 2018/1139 mentionné ci-dessus pour lesquels l’exercice de l’activité de transport aérien public est subordonné à une déclaration préalable, et ceux pour lesquels l’exercice de transport aérien public n’est subordonné ni à la délivrance d’un certificat de transporteur aérien, ni à une déclaration préalable. »
A- Les aéronefs sans équipage à bord sont exploités de manière à ce qu’il n’en résulte pas un risque de dommage aux autres aéronefs.
B- En évolution hors vue dans le cadre d’exploitation de systèmes d’aéronef sans équipage à bord autre que celles relevant de la catégorie ouverte ou que celles pratiquées au sein d’associations d’aéromodélisme.
-L’aéronef évolue à une hauteur inférieure à 50 mètres au-dessus de la surface ou inférieure à 15 mètres au-dessus de la hauteur de l’obstacle artificiel de moins de 105 mètres de hauteur le plus élevé dans un rayon horizontal de 50 mètres ;
-Si sa masse est inférieure à 2 kilogrammes alors une hauteur de vol inférieure à 120 mètres au-dessus de la surface ou inférieure à 15 mètres au-dessus de la hauteur de l’obstacle artificiel de plus de 105 mètres de hauteur le plus élevé dans un rayon horizontal de 50 mètres ;
-Les aéronefs sans équipage à bord utilisés dans le cadre de missions de recherche et de sauvetage, de lutte contre l’incendie, de douane, de police ou de sécurité civile ou activités analogues sous le contrôle et la responsabilité de l’Etat peuvent évoluer en dérogation aux dispositions du présent arrêté lorsque les circonstances de la mission le justifient. A une hauteur supérieure à 120 mètres au-dessus de la surface ou à 15 mètres au-dessus d’un obstacle artificiel de plus de 105 mètres de hauteur le plus élevé dans un rayon horizontal de 50 mètres, des mesures particulières sont mises en œuvre pour assurer leur compatibilité avec la circulation des autres aéronefs.
Les vols effectués en zone peuplée sont soumis à une déclaration préalable auprès du préfet territorialement compétent pouvant donner lieu à une interdiction ou une restriction de vol. La déclaration est effectuée par les exploitants avec un préavis de cinq jours ouvrables par voie électronique sur le portail internet mis en place à cet effet par le ministre chargé de l’aviation civile, ou au moyen du formulaire CERFA n° 15476 intitulé « déclaration préalable au vol en zone peuplée d’un aéronef circulant sans personne à bord » disponible auprès du ministre chargé de l’aviation civile.
Des règles complémentaires s’appliquent à proximité d’une piste aérienne (voir texte original).
Un aéronef sans équipage à bord n’évolue pas de nuit au sens du règlement d’exécution (UE) n° 923/2012 et de l’arrêté du 11 décembre 2014 susvisés, sauf :
– A l’intérieur d’une portion d’espace aérien selon des modalités qui permettent d’assurer une ségrégation d’activité entre cet aéronef et les autres usagers aériens.
Les zones sont :
– zones réglementées, à l’exclusion des zones dites à « pénétration après contact radio » ;
– zones réservées temporairement (TRA) ;
– zones de ségrégation temporaire (TSA) ;
– pour les aéronefs sans équipage à bord d’Etat, zones de contrôle et régions de contrôle terminales gérées par un prestataire de service de contrôle de la circulation aérienne relevant du ministre de la défense
Ordonnance n° 2022-456 du 30 mars 2022 relative à la création d’un régime de déclaration dans le domaine de la sécurité aérienne et à l’adaptation du droit national à l’entrée en vigueur du règlement (UE) 2018/1139 du 4 juillet 2018
Nous avons souhaité expliquer les conditions d’exploitation des images par les autorités, sous le contrôle et la responsabilité de l’état. en référence à :
DIRECTIVE (UE) 2016/680 DU PARLEMENT EUROPÉEN ET DU CONSEIL du 27 avril 2016 relative à la protection des personnes physiques à l’égard du traitement des données à caractère personnel par les autorités compétentes à des fins de prévention et de détection des infractions pénales, d’enquêtes et de poursuites en la matière ou d’exécution de sanctions pénales, et à la libre circulation de ces données.
Cette directive est similaire au règlement général N°2016/679 sur la protection des données personnelles. (RGPD) de la CNIL (Commission Nationale de l’informatique et des libertés. Pour la CNIL un aéronef sans équipage à bord est un engin d’observation, d’acquisition et de transmissions de données géolocalisées.
Le 18 mai 2020, le conseil d’état a demandé de cesser sans délai l’usage des drones en raison de la collecte de données identifiables. Les données identifiables sont considérées comme un traitement de données personnelles. De plus, il considère que aucune formalité réglementaire préalable a été déposée et que la présence d’un zoom est en relation avec un dispositif de surveillance litigieux.
Levée de doutes :
La CMP (Commission Mixte Paritaire) a été saisie afin de trouver un compromis entre l’assemblée nationale et le sénat en référence à l’article 45 de la constitution de 1958. Les lois suivantes ont été modifiées après consultation du CNAPS (Conseil National des Activités Privées de Sécurité), par la CNIL pour permettre au Conseil constitutionnel de statuer :
–
-Loi 2022-52 du 24 janvier 2022 relative à la responsabilité pénale et à la sécurité intérieure.
Par décision du conseil constitutionnel N°2021-834DC du 20 janvier 2022.
-Loi 2021-646 du 25 mai 2021 pour une sécurité globale préservant les libertés.
Par décision du conseil constitutionnel N° 2021-817DC du 20 mai 2021.
Pour comprendre les décisions, ils est important de prendre en considération l’origine des problèmes concernant l’usage des vidéos : La CNIL considère que l’encadrement juridique de la protection des données personnelles est insuffisante. La captation d’images par voie aérienne est considérée comme un risque de surveillance permanente. Plus concrètement, le risque porte sur la reconnaissance faciale des personnes par intelligence artificielle dans un espace public à partir des photos, images de drones. Les données des drones sont envoyées dans une base de données TAJ (Traitement d’Antécédents Judiciaire) et elles pourraient par comparaison identifier des personnes par reconnaissance faciale à partir des photos de la base de données biométriques, anthropométriques, corporelles TES (Traitement Electronique Sécurité) de toute la population. La crainte d’une utilisation croisée et une interconnexion entre les bases de données a fait l’objet d’une vive interrogation par la CNIL. C’est pourquoi, le conseil constitutionnel a censuré l »article sur la surveillance par drones et hélicoptères.
L’usage de la vidéo par les pouvoirs publics, les forces de sécurité est donc encadré. Nous pouvons résumer les décisions suivantes :
– L’utilisation des drones doit être utilisée pour la prévention des atteintes à la sécurité des personnes et des biens, à la sécurité des rassemblements sur la voie publique, à la prévention d’actes de terrorisme, la surveillance des frontières en vue de lutter contre leur franchissement irrégulier, la régulation des flux de transport, le secours aux personnes.
– L’utilisation doit être circonscrite, délimitée et préciser la finalité des missions.
-L’utilisation doit justifier la nécessité de l’usage des drones pour obtenir une autorisation du préfet.
– Il est refusé d’utiliser un drone immédiatement pendant 4 heures sans autorisation préalable du préfet même en cas d’exposition particulière et imprévisible en raison d’un risque d’atteinte caractérisée des personnes et aux biens car cela n’est pas conforme à la constitution.
– La définition du cas d’urgence est trop vaste et ne peut permettre l’utilisation des drones.
CONCLUSION :
SAPHIR GROUP AERO est donc en mesure de fournir un drone avec des nouveaux procédés techniques capable de respecter la législation et la sécurité des vols. Merci de nous consulter afin de pouvoir découvrir nos innovations opérationnelles.
EXPLOITANTS OPERATEURS
Gestion d’une flotte de drones :
1-Scénarios standards ( National ou EU) : Déclaration d’exploitation à la DSAC et sans autorisation d’exploitation obligatoire.
2-Scénarios non standards. deux cas possibles.
2A : Déclaration et autorisation obligatoire.
2B : Exploitant LUC (Light Uas operator Certificate) : Pas d’autorisation d’exploitation si certificat LUC. Il approuve ses propres opérations sur la base d’une exploitation des risques sous condition d’avoir un système de gestion de la sécurité et des exigences renforcées.
.


EXIGENCES EXPLOITANTS & OPERATEURS
La réglementation opérationnelle AIR-OPS ( EU 965/2012) impose un système de gestion (SG) aux exploitants et opérateurs. Ils sont classés dans 4 catégories :
– CAT : opérations pour des fins commerciales.
-NCC : Opérations pour des transports non commerciaux
-SPO : Opérations spécifiques pour des fins commerciales.
-NCO : Opérations non commerciales non soumise à un système de gestion.
Pour garantir une exploitation plus sûre des aéronefs il est nécessaire d’avoir une organisation adaptée. Pour les catégories CAT, NCC, SSPO, l’exploitant – opérateur doit fournir une organisation humaine avec une chaine de responsabilités. La chaine est la suivante et elle impose 8 personnes et 2 comités , un superviseur des opérations
– CR : Cadre responsable
– Personnes pour veiller au respect des exigences applicables.
– RGS : Responsable sécurité
– RSC : Responsable surveillance et conformité
-RDOV : Responsable opérations en vol
-RDOS : Responsable opérations au sol
-RDFE : Responsable formation équipage
-RDMN : Responsable maintien en navigabilité (avec ou sans PART 145 externe).
– Comité SRB (SAFETY REVIEW BOARD) pour stratégie sécurité dans les exploitations complexes.
-Comité SAG (SAFETY ACTION GROUP), relais du SRB pour identifier les risques, atténuer les risques, évaluer l’impact des changements de sécurité.
-Superviseur pour la vérification des exigences réglementaires



EXIGENCES D’EXPLOITATION
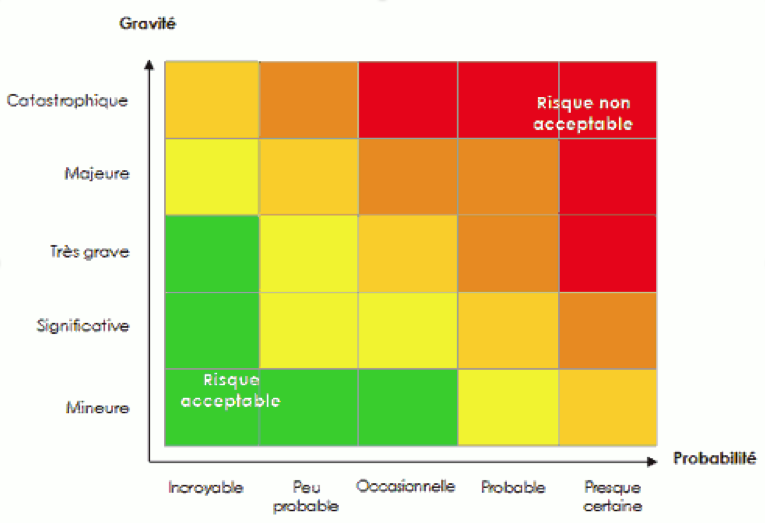
Le système de gestion est nommé politique de sécurité et il a pour objectif de prendre en considération le niveau de sécurité au niveau qualitatif et quantitatif en référence aux objectifs SMAT ( Spécifiques, Mesurables, Atteignables, Réalistes, Temporels).
L’objecti des exigences de l’AIR-OPS est d’empêcher des évènements lorsque l’exploitation est exposée à des dangers. Ils sont intégrés dans 3 méthodes :
– Identifier les dangers (Réactif (passé), Proactif (présent), Prédictifs (futur)).
– Evaluation des risques.
– Atténuation des risques.
Ils sont matérialisés dans un modèle graphique à noeud papillon « BOWTIE ». On peut identifier les EI (Evènement à éviter), les dangers (éléments, causes de l’EI), l’EU (Conséquences potentielles), Barrières (Moyens mis en place pour empêcher. ledanger) et une évolution du graphe en fonction de la progression du scénario. Il sera ainsi possible de justifier le niveau de risquee, c’est à dire la probabilité de la gravité de l’évènement, etc. Une étude de sécurité (EDS) est donc imposée pour obtenir un certificat de navigabilité (CDN) et un certificat de Transport aérien (CTA).
Les tableaux suivants permettent de visualiser les risques qualitatifs et quantitatifs en relation avec l’EDS.

SAPHIR GROUP AERO
AGENT OFFICIEL
TRANSFORMATEUR DE DRONES
CLASSES DE DRONE
Altitude 120 m Dimension < 3 m
C0
CATEGORIE
OUVERTE
Mode Utilisation A1
M < 250 g
Pilote VLOS 50 m Max
Distance sécurité horizontale tiers
0 m Max
Certificat DSAC : NON
OUI si capteurs
C 1
CATEGORIE
OUVERTE
Mode Utilisation A1
M < 900 g
pilote VLOS 50 m Max
Distance sécurité horizontale tiers
0 m Max
Certificat DSAC : OUI
OUI Si espace clos-couvert M>800g
C 2
CATEGORIE
OUVERTE
Mode Utilisation A2 – A3
M < 2-4 kg
pilote VLOS 50 m Max
Distance sécurité horizontale tiers
30 m Max / 5 Faible vitesse
Certificat DSAC : OUI
C3
CATEGORIE
OUVERTE
Mode Utilisation A3
M < 25 kg
pilote VLOS 50 m Max
Distance sécurité horizontale tiers
150 m Max
Certificat DSAC : OUI
C4
CATEGORIE
OUVERTE
Mode Utilisation A3
M < 25 kg
pilote VLOS 50 m Max
Distance sécurité horizontale tiers
150 m Max
Certificat DSAC : OUI
C5-6
CATEGORIE
OUVERTE
Mode Utilisation A3
M < 250 g
pilote VLOS 50 m Max
Distance sécurité horizontale tiers
150 m Max
Certificat DSAC : OUI
PRIVE 1-2
CATEGORIE
OUVERTE
Mode Utilisation A1
M < 25 kg
Pilote VLOS 50 m Max
Distance sécurité horizontale tiers
150 m Max
Certificat DSAC : OUI
CATEGORIE SPECIFIQUE si M>25kg
C 5
CATEGORIE
SPECIFIQUE
Mode Utilisation A1
M < 25 kg
pilote BVLOS 1 km
Distance sécurité horizontale tiers
150 m Max
Certificat DSAC : OUI
SORA
C6
CATEGORIE
SPECIFIQUE
Mode Utilisation A2 – A3
M < 25 kg
pilote BVLOS 1 km – 2km si observateur
Distance sécurité horizontale tiers
150 m Max
Certificat DSAC : OUI
SORA
# 1
CATEGORIE
CERTIFIEE
Altitude X
x kg
pilote BVLOS
DVol international de drones cargo en IFR
Espace aérien AC
Certificat DSAC & EASA : OUI
Certificat de type ( Conception ) : OUI.
Certificat de navigabilité : OUI
Agrément d’exploitant aérien.
Télépilote : Licence de pilote.
#2
CATEGORIE
CERTIFIEE
Altitude : X
x kg
pilote BVLOS
Opération de vol urbains ou ruraux avec itinéraire prédéfinit dans les espace aérien U-SPACE et (4FLIGHT). Transport de passagers et marchandises.
Certificat DSAC : OUI
Certification EASA : OUI
#3
CATEGORIE
CERTIFIEE
Altitude X
x kg
pilote BVLOS
Opération identique #2 mais avec un pilote à bord
Certificat DSAC & EASA : OUI
SCENARIOS STANDARDS DE VOL
& fonctions SOL-AIR-AERONEF
S 1
Aéronef classe : S1
Mode de vol : VLOS
Zone contrôlée au sol (ZCS) : Hors zone peuplée
Survol de tiers : NON
Distance horizontale télépilote : 200 m
Masse maximum : 25 kg
Altitude max : 120 m
& Fonctions
1-Plaque de marquage
2-Fixation équipements sans altération qualité de vol.
3-Notice d’information décret drone 2016-1428
4-Volume maximum de vol
5-zone ségrégué, temporaire STA
6-Condition météorologique
7-Réserve énergie suffisante
8- Manex – manuel d’exploitation.
9-Séparation des autres aéronef
10-Manuel d’utilisation
11-Manuel d’entretien
12-Liaison radio (fréquence , puissance-accord ARCEP-ANFR).
13-Altitude capteur barométrique.
14-Programmation altitude, hauteur maximum
15-Coupure des moteurs en vol
16-Déclenchement automatique parachute si moteur hors services.
17-Si Déclenchement parachute alors alarme sonore.
18-Parachute standard si M>2kg
19-Parachute actif à éjection -extraction si M>4kg
20-Vitesse sol si M>4 kg
21-Indépendance de la chaine de commande avec radio, batterie, etc.
22-Cartographie et positionnement en temps réel
23-Programmation des limites de franchissement
24-Coupure moteur indépendante à distance.
25-Enregistrement 20 minutes de vol.
26-Signalement Wifi électronique / numérique
27-Identification direct à distance.
28-Système anti-collision.
29-Vol automatique.
30-Vol autonome.
Niveau de redondance de chaque fonction.
S 2
Aéronef classe : S2
Mode de vol : VLOS – BVLOS
Zone contrôlée au sol (ZCS) : Hors zone peuplée
Survol. detiers : NON
Distance horizontale télépilote : 1000 m
Masse maximum : inférieure 2 kg si altitude supérieure à 50m sinon 25 kg
Altitude max : 120 m
& Fonctions
1-Plaque de marquage
2-Fixation équipements sans altération qualité de vol.
3-Notice d’information décret drone 2016-1428
4-Volume maximum de vol
5-zone ségrégué, temporaire STA
6-Condition météorologique
7-Réserve énergie suffisante
8- Manex – manuel d’exploitation.
9-Séparation des autres aéronef
10-Manuel d’utilisation
11-Manuel d’entretien
12-Liaison radio (fréquence , puissance-accord ARCEP-ANFR).
13-Altitude capteur barométrique.
14-Programmation altitude, hauteur maximum
15-Coupure des moteurs en vol
16-Déclenchement automatique parachute si moteur hors services.
17-Si Déclenchement parachute alors alarme sonore.
18-Parachute standard si M>2kg
19-Parachute actif à éjection -extraction si M>4kg
20-Vitesse sol si M>4 kg
21-Indépendance de la chaine de commande avec radio, batterie, etc.
22-Cartographie et positionnement en temps réel
23-Programmation des limites de franchissement
24-Coupure moteur indépendante à distance.
25-Enregistrement 20 minutes de vol.
26-Signalement Wifi électronique / numérique
27-Identification direct à distance.
28-Système anti-collision.
29-Vol automatique.
30-Vol autonome.
Niveau de redondance de chaque fonction.
S 3
Aéronef classe : S3
Mode de vol : VLOS
Zone contrôlée au sol (ZCS) : zone peuplée
Survol. detiers : NON
Distance horizontale télépilote : 100 m
Masse maximum : 8 kg
Altitude max : 120 m
Exigences & Fonctions
1-Plaque de marquage
2-Fixation équipements sans altération qualité de vol.
3-Notice d’information décret drone 2016-1428
4-Volume maximum de vol
5-zone ségrégué, temporaire STA
6-Condition météorologique
7-Réserve énergie suffisante
8- Manex – manuel d’exploitation.
9-Séparation des autres aéronef
10-Manuel d’utilisation
11-Manuel d’entretien
12-Liaison radio (fréquence , puissance-accord ARCEP-ANFR).
13-Altitude capteur barométrique.
14-Programmation altitude, hauteur maximum
15-Coupure des moteurs en vol
16-Déclenchement automatique parachute si moteur hors services.
17-Si Déclenchement parachute alors alarme sonore.
18-Parachute standard si M>2kg
19-Parachute actif à éjection -extraction si M>4kg
20-Vitesse sol si M>4 kg
21-Indépendance de la chaine de commande avec radio, batterie, etc.
22-Cartographie et positionnement en temps réel
23-Programmation des limites de franchissement
24-Coupure moteur indépendante à distance.
25-Enregistrement 20 minutes de vol.
26-Signalement Wifi électronique / numérique
27-Identification direct à distance.
28-Système anti-collision.
29-Vol automatique.
30-Vol autonome.
Niveau de redondance de chaque fonction.
STS01
Aéronef classe C5
Mode de vol : VLOS
Zone contrôlée au sol (ZCS) + balisage, clôture : peuplé sans personnes non impliquées
Exigences & Fonctions
1-Plaque de marquage
2-Fixation équipements sans altération qualité de vol.
3-Notice d’information décret drone 2016-1428
4-Volume maximum de vol
5-zone ségrégué, temporaire STA
6-Condition météorologique
7-Réserve énergie suffisante
8- Manex – manuel d’exploitation.
9-Séparation des autres aéronef
10-Manuel d’utilisation
11-Manuel d’entretien
12-Liaison radio (fréquence , puissance-accord ARCEP-ANFR).
13-Altitude capteur barométrique.
14-Programmation altitude, hauteur maximum
15-Coupure des moteurs en vol
16-Déclenchement automatique parachute si moteur hors services.
17-Si Déclenchement parachute alors alarme sonore.
18-Parachute standard si M>2kg
19-Parachute actif à éjection -extraction si M>4kg
20-Vitesse sol si M>4 kg
21-Indépendance de la chaine de commande avec radio, batterie, etc.
22-Cartographie et positionnement en temps réel
23-Programmation des limites de franchissement
24-Coupure moteur indépendante à distance.
25-Enregistrement 20 minutes de vol.
26-Signalement Wifi électronique / numérique
27-Identification direct à distance.
28-Système anti-collision.
29-Vol automatique.
30-Vol autonome.
Niveau de redondance de chaque fonction.
STS02
Aéronef classe C6
Mode de vol : BVLOS
Distance télépilote : 1 km
Zone controlée au sol (ZCS) + balisage + clôture : Faible densité de population
Extension : 2 km si observateur.
Exigences & Fonctions
1-Plaque de marquage
2-Fixation équipements sans altération qualité de vol.
3-Notice d’information décret drone 2016-1428
4-Volume maximum de vol
5-zone ségrégué, temporaire STA
6-Condition météorologique
7-Réserve énergie suffisante
8- Manex – manuel d’exploitation.
9-Séparation des autres aéronef
10-Manuel d’utilisation
11-Manuel d’entretien
12-Liaison radio (fréquence , puissance-accord ARCEP-ANFR).
13-Altitude capteur barométrique.
14-Programmation altitude, hauteur maximum
15-Coupure des moteurs en vol
16-Déclenchement automatique parachute si moteur hors services.
17-Si Déclenchement parachute alors alarme sonore.
18-Parachute standard si M>2kg
19-Parachute actif à éjection -extraction si M>4kg
20-Vitesse sol si M>4 kg
21-Indépendance de la chaine de commande avec radio, batterie, etc.
22-Cartographie et positionnement en temps réel
23-Programmation des limites de franchissement
24-Coupure moteur indépendante à distance.
25-Enregistrement 20 minutes de vol.
26-Signalement Wifi électronique / numérique
27-Identification direct à distance.
28-Système anti-collision.
29-Vol automatique.
30-Vol autonome.
Niveau de redondance de chaque fonction.
PDRA-S01
Aéronef classe C5
Mode de vol : VLOS
Zone controlée au sol (ZCS) + balisage + clôture : sans personnes non impliquées
& Fonctions
1-Plaque de marquage : NON
2-Fixation équipements sans altération qualité de vol.
3-Notice d’information décret drone 2016-1428
4-Volume maximum de vol
5-zone ségrégué, temporaire STA
6-Condition météorologique
7-Réserve énergie suffisante
8- Manex – manuel d’exploitation.
9-Séparation des autres aéronef
10-Manuel d’utilisation
11-Manuel d’entretien
12-Liaison radio (fréquence , puissance-accord ARCEP-ANFR).
13-Altitude capteur barométrique.
14-Programmation altitude, hauteur maximum
15-Coupure des moteurs en vol
16-Déclenchement automatique parachute si moteur hors services.
17-Si Déclenchement parachute alors alarme sonore.
18-Parachute standard si M>2kg
19-Parachute actif à éjection -extraction si M>4kg
20-Vitesse sol si M>4 kg
21-Indépendance de la chaine de commande avec radio, batterie, etc.
22-Cartographie et positionnement en temps réel
23-Programmation des limites de franchissement
24-Coupure moteur indépendante à distance.
25-Enregistrement 20 minutes de vol.
26-Signalement Wifi électronique / numérique
27-Identification direct à distance.
28-Système anti-collision.
29-Vol automatique.
30-Vol autonome.
Niveau de redondance de chaque fonction.
PDRA-S02
Aéronef classe C6
Mode de vol : BVLOS
Distance télépilote : 1 km
Zone controlée au sol (ZCS) + balisage + clôture : Faible densité de population
Extension : 2 km si observateur.
& Fonctions
1-Plaque de marquage : NON
2-Fixation équipements sans altération qualité de vol.
3-Notice d’information décret drone 2016-1428
4-Volume maximum de vol
5-zone ségrégué, temporaire STA
6-Condition météorologique
7-Réserve énergie suffisante
8- Manex – manuel d’exploitation.
9-Séparation des autres aéronef
10-Manuel d’utilisation
11-Manuel d’entretien
12-Liaison radio (fréquence , puissance-accord ARCEP-ANFR).
13-Altitude capteur barométrique.
14-Programmation altitude, hauteur maximum
15-Coupure des moteurs en vol
16-Déclenchement automatique parachute si moteur hors services.
17-Si Déclenchement parachute alors alarme sonore.
18-Parachute standard si M>2kg
19-Parachute actif à éjection -extraction si M>4kg
20-Vitesse sol si M>4 kg
21-Indépendance de la chaine de commande avec radio, batterie, etc.
22-Cartographie et positionnement en temps réel
23-Programmation des limites de franchissement
24-Coupure moteur indépendante à distance.
25-Enregistrement 20 minutes de vol.
26-Signalement Wifi électronique / numérique
27-Identification direct à distance.
28-Système anti-collision.
29-Vol automatique.
30-Vol autonome.
Niveau de redondance de chaque fonction.
PDRA-G01
Aéronef classe C6
Mode de vol : EVLOS
Distance télépilote : 1 km Maximum
Zone controlée au sol (ZCS) + balisage + clôture : Faible densité de population
Ou dustance drone : 1 km Maximum si observateur visuel.
Altitude : moins de 150 m.
& Fonctions
1-Plaque de marquage
2-Fixation équipements sans altération qualité de vol.
3-Notice d’information décret drone 2016-1428
4-Volume maximum de vol
5-zone ségrégué, temporaire STA
6-Condition météorologique
7-Réserve énergie suffisante
8- Manex – manuel d’exploitation.
9-Séparation des autres aéronef
10-Manuel d’utilisation
11-Manuel d’entretien
12-Liaison radio (fréquence , puissance-accord ARCEP-ANFR).
13-Altitude capteur barométrique.
14-Programmation altitude, hauteur maximum
15-Coupure des moteurs en vol
16-Déclenchement automatique parachute si moteur hors services.
17-Si Déclenchement parachute alors alarme sonore.
18-Parachute standard si M>2kg
19-Parachute actif à éjection -extraction si M>4kg
20-Vitesse sol si M>4 kg
21-Indépendance de la chaine de commande avec radio, batterie, etc.
22-Cartographie et positionnement en temps réel
23-Programmation des limites de franchissement
24-Coupure moteur indépendante à distance.
25-Enregistrement 20 minutes de vol.
26-Signalement Wifi électronique / numérique
27-Identification direct à distance.
28-Système anti-collision.
29-Vol automatique.
30-Vol autonome.
Niveau de redondance de chaque fonction.
PDRA-G02
Aéronef classe C6
Mode de vol : BVLOS
Distance télépilote : 1 km
Zone controlée au sol (ZCS) + balisage + clôture : Espace aérien réservé
Extension : 2 km si observateur.
Exigences & Fonctions
1-Plaque de marquage
2-Fixation équipements sans altération qualité de vol.
3-Notice d’information décret drone 2016-1428
4-Volume maximum de vol
5-zone ségrégué, temporaire STA
6-Condition météorologique
7-Réserve énergie suffisante
8- Manex – manuel d’exploitation.
9-Séparation des autres aéronef
10-Manuel d’utilisation
11-Manuel d’entretien
12-Liaison radio (fréquence , puissance-accord ARCEP-ANFR).
13-Altitude capteur barométrique.
14-Programmation altitude, hauteur maximum
15-Coupure des moteurs en vol
16-Déclenchement automatique parachute si moteur hors services.
17-Si Déclenchement parachute alors alarme sonore.
18-Parachute standard si M>2kg
19-Parachute actif à éjection -extraction si M>4kg
20-Vitesse sol si M>4 kg
21-Indépendance de la chaine de commande avec radio, batterie, etc.
22-Cartographie et positionnement en temps réel
23-Programmation des limites de franchissement
24-Coupure moteur indépendante à distance.
25-Enregistrement 20 minutes de vol.
26-Signalement Wifi électronique / numérique
27-Identification direct à distance.
28-Système anti-collision.
29-Vol automatique.
30-Vol autonome.
Niveau de redondance de chaque fonction.
PDRA-G03
Aéronef classe C6 Autonome
(Surveillance, Logistique au dessus site industriel)
Mode de vol : BVLOS
Distance télépilote : Portée de la liaison C2
Zone controlée au sol (ZCS) + balisage + clôture : Faible densité de population
Routes préprogrammées / Précalculées.
Altitude : 50 m Maximum.
& Fonctions
1-Plaque de marquage
2-Fixation équipements sans altération qualité de vol.
3-Notice d’information décret drone 2016-1428
4-Volume maximum de vol
5-zone ségrégué, temporaire STA
6-Condition météorologique
7-Réserve énergie suffisante
8- Manex – manuel d’exploitation.
9-Séparation des autres aéronef
10-Manuel d’utilisation
11-Manuel d’entretien
12-Liaison radio (fréquence , puissance-accord ARCEP-ANFR).
13-Altitude capteur barométrique.
14-Programmation altitude, hauteur maximum
15-Coupure des moteurs en vol
16-Déclenchement automatique parachute si moteur hors services.
17-Si Déclenchement parachute alors alarme sonore.
18-Parachute standard si M>2kg
19-Parachute actif à éjection -extraction si M>4kg
20-Vitesse sol si M>4 kg
21-Indépendance de la chaine de commande avec radio, batterie, etc.
22-Cartographie et positionnement en temps réel
23-Programmation des limites de franchissement
24-Coupure moteur indépendante à distance.
25-Enregistrement 20 minutes de vol.
26-Signalement Wifi électronique / numérique
27-Identification direct à distance.
28-Système anti-collision.
29-Vol automatique.
30-Vol autonome.
Niveau de redondance de chaque fonction.



Note d’informations
1-Pour zone peuplée : Distance horizontale inférieure à 50 m d’une agglomération sur la carte aéronautique.
2-Pour rassemblement de personnes : Distance horizontale inférieure à 150 m.
Chaque pays de l’UE peut fixer des conditions différentes. A vous de vérifier.
3-Pour les tiers : Peronnes étrangères à la mission.
4-Autorisation d’exploitation DSAC : Si altitude supérieure à 120 m et à 50 m pour drones de masse supérieure à 2 kg (S2).
5-Espace ségrégué : Portions d’espace aérien ségréguée, volume maximum de vol.
Les structures d’espace aérien suivantes sont considérées comme permettant une ségrégation :
– Zones réglementées, à l’exclusion des zones dites à « pénétration après contact radio » ;
– Zones de ségrégation temporaire (TSA) ;
– Pour les aéronefs d’Etat, zones de contrôle et régions de contrôle terminales gérées par un prestataire de service de contrôle de la circulation aérienne relevant du ministre de la Défense.
Voies de circulation
Une attention particulière doit être portée sur les voies de circulation (chemin, route, voie ferrée…) traversant la zone d’exclusion des tiers. Même si elles ne traversent pas la zone d’exclusion des tiers, une distance minimale doit être garantie par rapport aux autoroutes, voie express et voies ferrées :
– l’aéronef ne doit pas évoluer à une distance horizontale inférieure à 30 mètres d’une autoroute ou route express, sauf lorsque celle-ci est neutralisée.
– l’aéronef ne doit pas évoluer à une distance horizontale inférieure à 30 mètres d’une voie ferrée ouverte à la circulation ferroviaire, sauf si l’exploitant s’est coordonné avec le gestionnaire de la voie concernée.
6-Autorisation du préfet, service aviation civile, service des armées du territoire : Vol de nuit.
Nuit aéronautique
Selon la réglementation aéronautique, la nuit s’entend comme « la période comprise entre la fin du crépuscule civil et le début de l’aube civile »*.
En pratique, on peut considérer que :
– Pour des latitudes comprises entre 30° et 60° (ex : France métropolitaine), la nuit commence 30 minutes après le coucher du soleil et se termine 30 minutes avant le lever du soleil ;
– Pour des latitudes inférieures ou égales à 30° (ex : certains territoires d’outremer), la nuit commence 15 minutes après le coucher du soleil et se termine 15 minutes avant le lever du soleil.
* Le crépuscule civil se termine lorsque le centre du disque solaire se trouve à 6 degrés en dessous de l’horizon et l’aube civile commence lorsque le centre du disque solaire se trouve à 6 degrés en dessous de l’horizon.
7-Prise de vue : Article D 133-10 du Code de l’aviation civile et arrêt du 27 juillet 2005.
Autorisation de 3 ans : Spectre invisible.
Autorisation tri annuel pour opérateur par le service territorial aviation civile : Spectre visible .
8-Aéronef. de plus de 25 kg : Article 6111-1 du Code des transport, Loi drones N° 2016-1428) – immatriculation obligatoire.
9-Homologation aéronefs : Exclusivement pour S1, S2, S3 mais pas pour spécifique selon scénarios standards. Seules les attestations de conception en vigueur continueront d’être valable jusqu’au 1/01/2026, date de fin des scénarios nationaux.
10-On parle d’attestation de conception pour un aéronef unitaire de conception individuelle et attestation de type pour les aéronefs en série. La durée est illimitée hors intervention DGAC.
Constructeur ou assembleur pour les kits.
Architecture du drone en fonction du scénario de vol
SCHEMA DE PRINCIPE AERONEF
Scénario S2 – Scénario S3
& autres scénarios standards, spécifiques
A
On peut distinguer la ségrégation des modules de coupure des moteurs, de déclenchement à distance des parachutes, de la cartographie.
Rappel : En mode FPV (vol en immersion), il est nécessaire d’avoir une double commande (radio commande).
Pour les autres scénarios SAPHIR GROUP AERO ajoute un système radio maillé avec 3 points de communication au sol, un transpondeur ADS-B émetteur et récepteur.
En cas de modification de l’architecture, SAPHIR GROUP intègre son propre auto pilote. L’architecture interne du système embarqué intègre des actionneurs intelligents ainsi gérer les décisions de sécurité de manière autonome, redondante grâce à un principe de décision d’actions par votes multiples. SAPHIR GROUP utilise un système SCADA embarqué et sur une console secondaire au sol.


EXEMPLE analyse de faisabilité pour MISE A NIVEAU
FAISABILITE TECHNIQUE
L’étude de faisabilité consiste préalablement à vérifier les fonctions de sécurité disponible sur le drone standard du marché et à les comparer aux exigences nécessaires pour un vol en scénario standard. Cette étude a pour objectif de vérifier si la charge utile du drone est suffisante pour intégrer des fonctions de sécurité supplémentaires en fonction de deux types d’intervention : Mise à niveau ou Modification.
Pour l’exemple nous avons choisi un drone DJI MATRICE M 300.
A :Les fonctions de sécurité standards sur aéronef sont :
– Système de localisation GNSS à partir satellites GPS, GALILEO.
– Récepteur ADS-B pour une surveillance à distance à 20 km des éronefs à proximité avec Altitude, Cap, Vitesse.
– 2 centrales inertielles
– 2 baromètres.
– 2 antennes pour système radio en temps réel + un antenne GNSS.
– 2 compas de navigation.
– 6 systèmes de visions pour la détection d’obstacle (0,7 – 40 m)
– 6 capteurs infrarouges pour détection d’obstacles (0,1 – 8 m).
– 2 Système de contrôle du signal de modulation PWM en relation avec le système de réception – transmission.
– 2 batteries intelligentes.
– 2 systèmes de communication sur les fréquences ( 2, 400 – 2,4835 GHz) et (5,725- 5,850 GHz).
. Système d’atterrissage d’urgence avec 3 moteurs sur 4.
B : Fonctions manquantes :
Les fonctions manquantes sont déterminées en fonction d’un scénario de vol standard ou spécifique. Dans notre exemple, nous allons traiter le cas du scénario standard et prendre référence des exigences imposées par la DGAC puis EASA en fonction des dates de vol.
On constate que le constructeur n’a pas ajouté les fonctions SOL – AIR – AERONEF conforme aux exigences de la DGAC-EASA.
Pour la partie AERONEF les fonctions suivantes sont à ajouter : Parachutes, coupure des moteurs à distance avec système indépendant au contrôle commande de l’aéronef, signaux sonore.
Les fonctions SOL et AIR sont absentes ( réseau de communication maillé redondance 3, voir les autres fonctions SAPHIR-GROUP AERO disponibles ci-après.
C : Faisabilité par rapport à la charge utile disponible
Masse maximum 9,000 kg
– Masse à vide 3,600 kg
– Batteries 2,700 kg
– Nacelle et optique 0,878 kg
– Ajour de 2 parachutes 1,300 kg
– Signal sonore, électronique 0, 522 kg
Charge utile restante. 0 kg
La charge utile permet de déterminer le scénario de vol en fonction des exigences.


FONCTIONS DE SECURITE POUR DRONES

DOUBLE STATION AU SOL
La station au sol complémentaire permet de gérer toutes les fonctions complémentaires en mode VLOS, BVLOS.
Des fonctions de déclenchement à distance, de contôle temps réel sont intégrées ainsi permettre au pilote ou à un opérateur complémentaire de gérer les risques.

TRACABILITE
Ajouter des fonctions de sécurité dans les parties SOL AIR AERONEF en fonction des exigences de la DGAC, de l’EASA est une obligation. En référence à la méthode SORA, SAPHIR GROUP ajoute des fonctions suplémentaires pour atténuer le niveau des risques, augmenter la fiabilité de fonctionnement. Pour gérer la traçabilité des nouveaux équipements en référence aux normes DO 254 (matériel) et DO 178 (Logiciel) un outil de traçabilité, de qualification entre les textes réglementaires et les activités produites par SAPHIR GROUP et ses partenaires. Pour garantir le succès du management des processus entre la règlementation et les nouvelles fonctions, SAPHIR GROUP a sélectionné le produit de la société VISURE.


METEO TEMPS REEL
La météorologie est de plus en plus imprévisible en raison du changement climatique et le risque de perte de portance de l’aéronef est bien présent en raison de ses limites de performance en fonction d’une vitesse de vent en fonction de l’echelle BEAUFORT.
SAPHIR GROUP ajoute à son auto-pilote des fonctions de stabilisation et de rattrapage automatique de portance en cas de rafale de vent ponctuelle , continue ainsi qu’un retour automatique au point de départ. Nous intégrons dans les drones BVLOS des tubes de pitot ainsi permettre au pilote au sol d’avoir des données réels car la météorologie ne peut donner des prévisions sur toutes les zones ponctuelles.

OBSERVATEUR NUMERIQUE
La réglementation impose d’avoir des observateurs tous les 2 km en cas d’extension de l’espace aérien BVLOS. SAPHIR GROUP AERO propose une solution d’observation statique ou dynamique avec tracking de l’aéronef et d’analyse et détection visuelle des aéronefs entrant dans l’espace aérien local. L’environnement aérien local est ainsi garantir à un niveau sécurité optimum. Elle est complémentaire au à la solution UTM de SAPHIR GROUP AERO

ESPACE AERIEN LOCAL UTM
La station au sol complémentaire peut intégrer en option un espace aérien local UTM pour drones en référence à l’organisation SESAR U-SPACE. Cette solution peut s’intégrer également au système ATM 4 FLIGHT avec l’application COFLIGH CLOUD SERVICES dans l’espace aérien européen de la zone FAB EC et le découpage aérien des zones françaises CRNA.
CARTOGRAPHIE 3D + RELIEF
Les constructeurs de drones proposent une cartographie standard et la création d’un plan de vol. SAPHIR GROUP propose une solution identique à GOEPORTAIL (Espace terrestre IGN + carte aéronautique) mais avec l’intégration d’une partie 3D. Grâce à cette cartographie 3D avec ajout des obstacles d’infrastructure et des limites de vol , le pilote du drone, les observateurs peuvent en temps réel visualiser la bonne exécution du plan de vol et des phases d’urgence. Nous avons matérialisé par trait dynamique virtuel la distance entre l’aéronef et la zone d’atterrissage d’urgence au cours du vol.

PILOTE AUTOMATIQUE
Découvrez le pilote automatique de SAPHIR GROUP AERO. On a transformer une architecture d’un Boeing sur un drone. Il est multi coeurs et intègre toutes les fonctions nécessaires pour pouvoir garantir un vol autonome.

LIDAR
Nous utilisons le capteur LIDAR pour la détection d’obstacle au sol et pour pouvoir assurer un tracking d’une zone ( montagne, …) Et nous l’associons à un capteur IR infrarouge pour la détection de cibles.

OPTIQUE PILOTE
Nous avons remplacer les yeux du pilote par des caméras optiques avec vision naturelle et infrarouge. L’ensemble est des images est transmise au sol par deux liaisons broadcast ainsi garantir la vision d’un obstacle. Cette solution vient renforcer le capteur LIDAR et le capteur infrarouge de détection. Cette fonction s’intègre sur les drones de catégories C5 et C6 pour des scénarios de vol S6. On vous invite à découvrir un exemple avec le drone MALE DA42. Grace aux zooms il est possible de découvrir le type d’aéronef.
Nous sommes pragmatique et nous n’avons pas encore associé l’intelligence artificielle pour faire une reconnaissance automatique de l’aéronef.

BVLOS Extension de couverture
La réglementation en scénarios standards permet de faire évoluer la distance en mode BVLOS. SAPHIR GROUP assure la création de plans de vol et du plan d’exploitation en référence aux exigences.

LIAISON RADIO & RESEAU
La communication C2 standard entre la station au sol et un drone peut faire l’objet de la perte de localisation du drone en cas de coupure du lien hertzien. SAPHIR GROUP AERO propose un réseau maillé local ainsi garantir aucune coupure de liaison radio. Cette solution fonctionne avec différentes fréquences civiles ou militaires. Les pylônes sont statiques ou nomades grâce à l’intégration d’une mooirisation. La solution utilise des transmissions et réceptions MIMO x 4, x 8 . Ils est alors possible de transmettre des flux de données, flux vidéo broadcast sur des fréquences différentes. Il est aussi possible d’assurer de manière manuelle ou automatique un saut de fréquence.
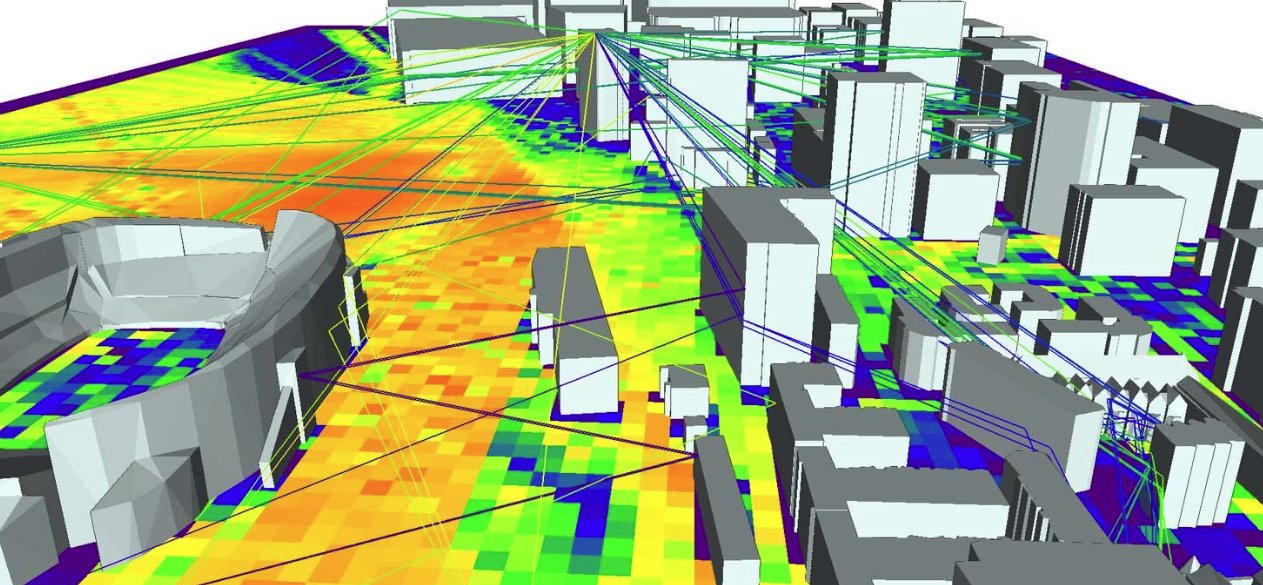
SIMULATION COUVERTURE RADIO 3D
Pour garantir aucun risque de coupure radio SAPHIR GROUP AERO réalise des bilans de liaison RADIO dans différentes bandes du spectre électromagnétique. Cette simulation intègre la partie topographie 3D, la partie obstacles comme des pylônes électriques, des bâtiments, ponts, etc. Cette simulation permet de définir avec précision la position des relais de communication du réseau local maillé.
APPLICATION SCADA - management des risques SOL AIR AERONEF
La maîtrise des risques est toujours difficile et les actions en cas d’incident sont toujours liés à un facteur humain. De plus, le pilote en mode BVLOS est distant et il est souvent concentré sur sa mission. La reglementation n’impase pas un diplôme de pilote pour les scénarios en catégorie ouverte et spécifique. La reglementation et la formation des pilotes de drones n’intègrent pas une évalution des performances, des conditions psychologiques, psychotechniques (stress, fatigue, etc.) pour garantir que les actions en cas d’urgence vont être prise immédiatement et non rapidement. Alors SAPHIR GROUP a crée une application embarquée pour les parties SOL AIR AERONEF. Cette application intègre dans une table informatique tous les risques possibles et ils sont ensuite est en relation , en réseau avec des actions à effectuer grâce à une architecture maillée. Les applications embarquées sont gérées par un système de controle SCADA .

ATTERRISSAGE D'URGENCE CONTINUE
Pour simplifier les procédures on a créé une application spécifique de préparation au plan de vol avec transfert des zones d’atterrissages dans les applications SCADA AERO SOL AIR AERONEF. Il est donc possible de déterminer préalablement lors du plan de vol les zones d’atterrissage d’urgence pour que au cours du vol l’aéronef soit capable de diriger ses paramètres de vol vers la zone la plus proche. La solution se décompose en trois modules :
– Le module 1 permet de transférer dans les applications SCADA parties SOL AIR AERONEF les zones d’atterrissage d’urgence (ZAU) et elle calcul au cours du vol un tracking virtuel continue de la ZAU la plus proche. Les ZAU ont été prédéterminées manuellement lors de la préparation du plan de vol.
-Le module 2 permet de détecter les obstacles à proximité du drone grâce à un capteur LIDAR lors de la procédure d’atterrissage d’urgence. A partir de. la position GPS et des cartes aéronautique et terrestre embarquées il est ainsi possible d’identifier automatiquement ou préalablement les positions, zones d’atterrissage d’urgence possible en campagne et en agglomération.
SYSTEMES OPTIQUES
Nous avons crée une solution exclusive optoélectronique pour la topographie ainsi avoir un principe de photogrammétrie optimum. Notre solution consiste à intégrer deux systèmes optiques de la société PHASEONE avec plus de 280 millions de pixels. L’enregistrement est effectué par des calculateurs graphiques spécifiques embarquées. Les données sont transférées par plusieurs liaisons BROADCAST vers un relais INTERNET pour être ensuite diriger vers un super calculateur distant pour la partie traitement. Après reconstruction du modèle 3D à partir des images sources, un modèle léger est transmis à la station au sol ainsi obtenir des information très précise d’une zone à partir du déplacement continue du drone par télé-pilotage, par tracking, par pré-programmation pour un vol autonome. .
NOS OUTILS

MACHINE D'ETATS
La réalisation d’algorithmes est. de plus en plus complexe et doit respecter des exigences de fonctionnement. SAPHIR GROUP utilise les outils de IAR SYSTEM pour modéliser ses machines d’états ainsi garantir un haut niveau de fiabilité de l’application embarquée. Les machines d’états sont transformées en code grâce à un compilateur C/C++ certifié ainsi pouvoir fonctionner de manière autonome sur différentes cibles comme un microprocesseur, un MPSoC.

MPSoC
SAPHIR GROUP intègre ses applications logicielles embarquées dans un MPSoC (Multi Processor Systèm On a Chip), un composant fiable et sécurisé. Nous intégront l’application dans des processeurs avec RTOS (Real Time Operating System) pour les calculs et dans une partie FPGA pour effectuer des traitements logiques multi-protocoles. Nous utilisons les solutions de IAR et de SIEMENS.
SIMULATION DYNAMIQUE 3D
Les certifications des drones en catégorie spécifique lors de la partie modification imposent de justifier le niveau d’atténuation en référence à la méthode SORA de l’organisation JARUS. SAPHIR GROUP AERO réalise l’architecture , la conception, la simulation et la justification théorique et pratique des mesures d’atténuation des risques comme l’énergie à l’impact à partir d’un parachute en cas de chute de l’aéronef. Nous utilisons le produit SIEMENS NX et ses modules scientifiques pour apporter les réponses à partir de simulation cinématique, statique.
DRONES MALES
notre sélection
ENDURANCE M300 DJI : 30 min

ENDURANCE DA42 DIAMOND AIRCRAFT : 19 h à 22 h


ENRURANCE UKR SPEC SYSTEMS : 8 à 10 h
(+5 h avec batteries SAPHIR GROUP ENERGIES)


PLANEURS SAPHIR OBSERVEUR & SAPHIR THRUST
PLANEUR MALE
(Medium Altitude Long Endurance )
Un planeur SAPHIR OBSERVEUR , une faible signature CO2 grâce à des moteurs électriques, une pile à combustible pour transformer l’éthanol en énergie électrique et une endurance de 20 heures à 40 heures.
ENDURANCE : 20 à 40 heures




PLANEUR SAPHIR THRUST
ENDURANCE : 4 – 6 heures
MTOW 15 à 25 kg Charge utile à partir de 4 kg.
Nous avons transformé un planeur conforme aux exigences SORA. Pour garantir le respect des performances de sécurité de fonctionnement, notre aéronef sans équipage à bord à une charge utile de 4 kg contrairement à ses concurrents. Il décolle et atterrit de manière autonome mais pas uniquement. Nous avons intégré une double motorisation, un ADS-B, un FLARM, un GNSS, des signaux lumineux, une alerte sonore, un parachute et des systèmes de communication ségrégués pour la vidéo et les communications de contrôle et de commande, l’émission de la transmission des consignes de sécurité. La partie embarqué intègre deux pilotes automatiques avec une application SCADA embarquée. L’ensemble est géré par deux stations au sol. La première pour le pilote et la deuxième pour la partie sécurité avec la création d’un espace de vol local et privé en relation avec une station UTM. Le réseau maillé IP -MESH MIMO ( x4 – x8) avec une redondance x 3 soit 8 antennes pour garantir 3 réseaux indépendants avec une redondance de niveau 2. En cas de perte de signal, il y a basculement automatique du support de liaison hertzien mais également un changement de relais. Nos relais couvrent l’ensemble de l’espace local avec une redondance de niveau 3. Une solution de communication plus fiable qu’une liaison C2, plus performante qu’une liaison satellite à la bande passante étroite, au débit limité. Avec 4 à 8 kg de charge utile vous pouvez intégrer un imageur optique, un capteur LIDAR, et d’autres systèmes de mesure. Mais nous avons intégré notre expérience pour transformer cet aéronef en drone silencieux pour une longue endurance de vol. Nos moteurs fonctionnent de manière continue ou en alternance et les hélices sont spécifiques pour garantir un vol sans bruit à 50 mètres d’altitude. Plus besoins de chercher les meilleurs cumulus, les thermiques, les bleus pour garantir un vol en longue endurance. Le tube PITOT et ses capteurs météorologiques permettent de voler de manière intelligente. Nous avons intégrer une nouvelle fonction. Le tracking d’une position au sol grâce à un vol en spiral avec gestion intelligente du taux de montée et du taux de chute ainsi garantir un angle d’inclinaison optimum de 30° (50° MAX) . Par nos courbes polaires nous maitrisons, contrôlons la vitesse dans les virages ainsi être toujours inférieure à la vitesse de rotation des boules optiques. Nous avons intégré un pilote automatique avec modification en temps réel des paramètres de vol pour garantir de manière permanente une portance optimum. Il est ainsi possible de gérer les vents forts, les turbulences. Regarder les performances d’un drone impose d’avoir des explications de ses fonctions embarquées pour pourvoir être comparé.



DRONES DE COMPETITIONS

URBAN DRONES
Depuis de longues années on transforme des drones. Ils peuvent voler seul ou en groupe. Ils peuvent contourner une cible ou la détruire.
Des drones de compétition dans des espaces fermés mais aussi dans les espace ouverts. Compétition sportive, Compétition de guerre. A vous de choisir le scénario.
VOL avec pilote ou autonome avec préprogrammation .
DRONE BIRD
VOL- OBSERVE – ECOUTE






DRONE BIRD est un oiseau robot, un ornithoptère capable de se confondre dans l’environnement réel. La forme et la texture sont réalisées par imprimante 3D avec des matériaux polymères et élastomères dont une texture couleur à été associée. Son principe bionique pour garantir sa sustentation est en relation avec un battement d’ailes mécatronique dont la portance est variable. Il est capable de voler dans des conditions météorologiques difficiles. Une batterie est associée à un auto-pilote pour permettre des vols autonomes sans communication et sans brouillages externes. Il est donc insensible aux attaques hertziennes. Il est furtif et silencieux. Il est équipé d’un système visuel et d’écoute. Il fonctionne à partir d’une liaison radio BF (basse fréquence) et à une autonomie de 24 heures. Grâce à ses ailes spécifiques, il est capable de recharger sans intervention humaine. L’architecture interne avec puce électronique SoC INTEL et l’application SCADA embarquée de gérer les vols ainsi ne plus avoir de limite de distance. Des fonctions spécifiques sont associées pour des missions en fonction du cahier des charges. Sa valeur ajoutée, il est capable. de voler en groupe avec une architecture hybride « Maître-Esclave », « Maître – Maître » grâce aux systèmes de communication BF (basse fréquence). Il peut ouvrir un canal de communication Broadcast AIR SOL indépendant ainsi faire abstraction aux brouillages. Une solution de SAPHIR GROUP INGENIO & de SAPHIR GROUP AERO.
DECOUVRIR NOS OUTILS DE CONCEPTION – DE FABRICATION – DE SIMULATION


